4.2. R-Shape / Polyhedron
In this section, we will describe the various information used to build simulations with R-shape or sphero-polyhedron particles.
4.2.1. Overview
The polyhedra implemented in ExaDEM are sphero-polyhedra, i.e. the vertices of the polyhedra are considered as spheres and the edges as cylinders. To achieve this, ExaDEM incorporates many of the features of the Rockable DEM code developed at CNRS (https://github.com/richefeu/rockable, https://richefeu.github.io/rockable/quickStart.html). ExaDEM relies in particular on a Shape class containing information about the polyhedron (vertex, edge, face, and Minskowski radius) and an interaction class used to qualify a contact between polyhedra. It’s important to note that the spheropolyhedron approach can be used to simulate complex non-convex particles such as hexapods.
4.2.2. Shape
The Shape class provides all the information on vertices, edges, and faces, but it also provides other support to speed up calculations, such as OBB sets for each type of information. ExaDEM provides many features linked to the Shape class, such as reading .shp files (the format used by Rockable), as well as other functions such as outputting a .vtk file of the shape. This class is defined by the following properties:
Property Name |
Attribute Name |
Description |
|---|---|---|
Vertices |
|
List of the polyhedron’s vertices. |
Edges |
|
List of the polyhedron’s edges. |
Faces |
|
List of the polyhedron’s faces. |
Minkowski Radius |
|
Minkowski radius (radius of the vertices). |
Volume |
|
Total volume of the polyhedron. |
Inertia Coefficient |
|
Inertia coefficient normalized by mass. |
Name |
|
Name of the object (defaults to “undefined”). |
OBB |
|
Oriented Bounding Box of the polyhedron. |
Vertex OBBs |
|
List of |
Edge OBBs |
|
List of |
Face OBBs |
|
List of |
Note
OBB (Oriented Bounded Boxes) are enlarged of the Minskowki radius.
Note
By default, every shape is stored in a list of shapes, and the maximum cut-off radius is deduced from these shapes. Note that a cut-off radius that is too large can drastically reduce simulation performance. That’s why, do not put big shapes using the classical way (i.e. read_shape_file), big shapes should be defined as drivers.
Shape example (octahedron, 6 vertices, 12 edges, and 8 faces):
<
name Octahedron
radius 0.1
preCompDone y
nv 6
0.2310789034541148 -0.2310789034541148 0.0
0.2310789034541148 0.2310789034541148 0.0
0.0 0.0 0.32679491924311227
-0.2310789034541148 -0.2310789034541148 0.0
-0.2310789034541148 0.2310789034541148 0.0
0.0 0.0 -0.32679491924311227
ne 12
0 1
2 1
2 0
0 3
2 3
3 4
4 2
4 1
5 0
5 1
5 4
5 3
nf 8
3 0 1 2
3 2 3 4
3 1 2 4
3 0 2 3
3 0 5 1
3 0 5 3
3 3 5 4
3 4 5 1
obb.extent 0.33107890345411484 0.33107890345411484 0.4267949192431123
obb.e1 1.0 0.0 0.0
obb.e2 0.0 1.0 0.0
obb.e3 0.0 0.0 1.0
obb.center 0.0 0.0 0.0
position 0.0 0.0 0.0
orientation 1.0 0.0 0.0 0.0
volume 0.16666666666666666
I/m 0.04999999999999999 0.04999999999999999 0.04999999999999999
>
Or a sphere (1 vertex, 0 edge, 0 face):
<
name alpha1
radius 0.5
preCompDone y
nv 1
0 0 0
ne 0
nf 0
obb.extent 0.5 0.5 0.5
obb.e1 1 0 0
obb.e2 0 1 0
obb.e3 0 0 1
obb.center 0 0 0
volume 0.523598775598299
I/m 0.1 0.1 0.1
>
It’s important to note that using a shape of a spherical particle with a polyhedron configuration instead of directly using a sphere configuration decreases overall performance due to unnecessary calculations, such as applying an orientation to a vertex. We have observed that in this case, simulations are about 2 to 3 times slower.
Operator Name:
read_shape_fileDescription: This operator initialize the shapes data structure from a shape input file.
Parameters:
filename: Input file name (.shp)scale_factor: rescale all shapes. Optional parameter.rename: rename all shapes. Optional parameter
YAML example:
- read_shape_file:
filename: shapes.shp
rename: [PolyR, Octahedron]
- read_shape_file:
filename: shapes.shp
rename: [ PolyRSize2, OctahedronSize2]
scale_factor: [ 2.0, 2.0]
Example: See Example 6: Rescale shape .
4.2.3. Basic Shapes
ExaDEM provides some basic shapes without using a shape file.
Operator Name:
add_sphereDescription: Add a sphere to the shape lists.
Parameters:
length: Define cube length.minskowski: Define the Minskowski value.
- add_sphere:
name: MySphere
minskowski: 1.0
Operator Name:
add_cubeDescription: Add a cube to the shape lists.
Parameters:
length: Define cube length.name: Set Shape name. Default is “cube”.minskowski: Define the Minskowski value.
YAML Example:
- add_cube:
name: MyCube
length: 0.5
minskowki: 0.25
Operator Name:
add_riceDescription: Add a rice to the shape lists.
Parameters:
length: Define rice length.name: Set Shape name. Default is “rice”.minskowski: Define the Minskowski value.
YAML Example:
- add_rice:
name: MyRice
length: 0.5
minskowki: 0.025
4.2.4. Polyhedra - Interaction / Contact
The exaDEM::Interaction class in ExaDEM is used to model various types of interactions between polyhedra and between polyhedra and drivers. This class serves as a crucial component for identifying two elements within the data grid and characterizing the type of interaction between them.
Interaction Class Attributes:
\(id_i\) and \(id_j\): Id of both polyhedra.
\(cell_i\) and \(cell_j\): Indices of the cells containing the interacting polyhedra.
\(p_i\) and \(p_j\): Positions of the polyhedra within their respective cells.
\(sub_i\) and \(sub_j\): Indices of the vertex, edge, or face of the polyhedron involved in the interaction.
type: Type of interaction (integer). See Interaction Glossary.
friction and moment: Storage used for temporary computations.
Note
When the interaction involves a polyhedron and a driver, particle j is used to locate the driver. In this scenario, cell_j represents the index of the driver. If the driver utilizes a shape, such as with RShapeDriver, sub_j is also utilized to store the index of the vertex, edge, or face.
Value |
Type |
Description |
|---|---|---|
0 |
Vertex - Vertex |
Contact between two vertices of two different polyhedra |
1 |
Vertex - Edge |
Contact between a vertex and an edge of two different polyhedra |
2 |
Vertex - Face |
Contact between a vertex and a face of two different polyhedra |
3 |
Edge - Edge |
Contact between two edges of two different polyhedra |
4 |
Vertex - Cylinder |
Contact between a vertex of a polyhedron and a cylinder |
5 |
Vertex - Surface |
Contact between a vertex of a polyhedron and a rigid surface or wall |
6 |
Vertex - Ball |
Contact between a vertex of a polyhedron and a ball / sphere |
7 |
Vertex - Vertex (Driver) |
Contact between a vertex of a polyhedron and a vertex of a RShape Driver |
8 |
Vertex - Edge (Driver) |
Contact between a vertex of a polyhedron and an edge of a RShape Driver |
9 |
Vertex - Face (Driver) |
Contact between a vertex of a polyhedron and a face of a RShape Driver |
10 |
Edge - Edge (Driver) |
Contact between an edge of a polyhedron and a edge of a RShape Driver |
11 |
Vertex (Driver) - Edge |
Contact between a vertex of a RShape Driver and an edge of a polyhedron |
12 |
Vertex (Driver) - Face |
Contact between a vertex of a RShape Driver and a face of a polyhedron |
13 |
Inner Bond |
Contact within a grain composed of fragments (polyhedra) |
Interaction Class Usage:
To retrieve data associated with a specific interaction between two polyhedra, the attributes of the exaDEM::Interaction class are used to identify cells, positions, and interaction types. This information is then used within simulation computations to accurately model interactions between polyhedra, considering the interaction type.
These interactions are used as a level of granularity for intra-node parallelization, applicable to both CPU and upcoming GPU implementations. The interactions are populated within the nbh_polyhedron operator and subsequently processed in the contact_polyhedron operator.
In summary, the exaDEM::Interaction class provides a crucial data structure for managing interactions between polyhedra and drivers within DEM simulations. By storing information such as cell numbers, positions, and interaction types, it enables precise modeling of physical interactions between simulated objects.
Grid Of Interactions:
In ExaDEM, interactions are stored in the form of a grid of cells (AOSOA), the cell (SOA) then containing a GridExtraDynamicDataStorageT, i.e. a data structure similar to a vector of Interactions + particle information vector. This data structure facilitates the migration of information between MPI processes when the interaction is considered to be always active (i.e. the two polyhedra are always in contact from one time step to the next). For more details in code, see src/polyhedra/include/exaDEM/interaction/grid_cell_interaction.hpp and the extra_storage package in ExaNBody.
Classifier:
To improve the implementation of kernels linked to GPU interactions, exaDEM relies on the classifier class, which sorts all interactions by type in an SOA, so that several kernels can be launched, each dealing with the same type of interaction. The aim is to limit instruction divergence between GPU threads.
It’s important to point out that this data structure complements the interaction grid. The main idea is to classify and unclassify interaction information as long as the data has not changed (cell migration, move particle, IO). To achieve this, we use two operators: classify and unclassify.
Using the classifier is currently the default strategy in exaDEM for spheres and polyhedra.
4.2.5. Fragmentation Feature
Note
This feature is currently experimental.
The strategy for handling fragmentation in exaDEM consists of pre-cutting the grains into small polyhedrons and adding springs between the opposite vertices for the faces to be bonded. To use these developments, you must include the config_fragmentation.msp file instead of config_polyhedra.msp.
The criterion for sticking particles depends on the distance between opposite vertices based on the distance defined by: sticking_threshold: 1.e-04 to be defined in the global operator, please also define apply_particle_sticking: true.
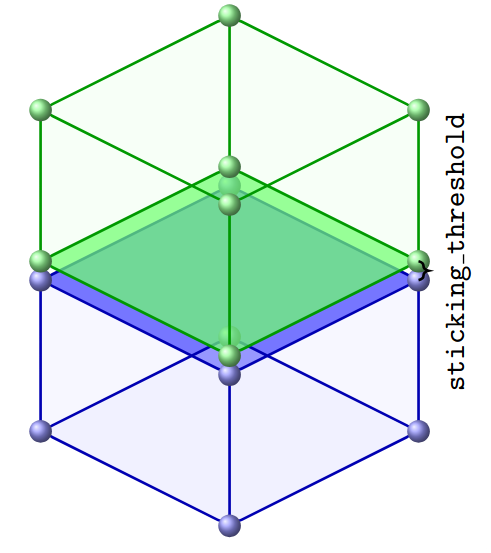
Finally, exaDEM will process interfaces that are a set of InnerBond interactions (typeId = 13) and check at each time step whether the energy released exceeds a certain threshold (depending on the surface area and a parameter g).
If an Interface is broken, the interactions are removed and the interaction lists are reconstructed. Note that if two particles are stuck together by an interface, no other interactions (vertex-vertex, vertex-edge, etc.) are possible.
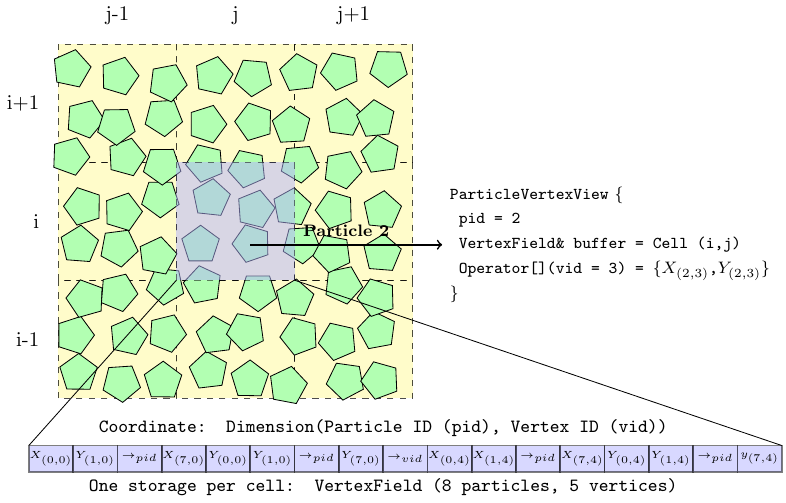
4.2.6. Data layout: Particle Vertices
The vertices of the polyhedra are stored in a different grid structure called CellVertexField. It is composed as a grid of VertexFields and is reallocated by the compute_vertices operator.
The following image illustrates the memory layout of the vertices:
Operator name:
compute_verticesDescription: This operator computes the vertices for every polyhedron.
Parameters:
resize_vertex: enable to resize the data storage used for vertices, default is true
minimize_memory_footprint enable to resize the data storage using only the maximum of vertices according to the particle shapes into a cell. This option is useful if there are some particles with a very high number of particles, default is false.
YAML examples:
compute_new_vertices:
- compute_vertices:
resize_vertex: true
compute_fast_vertices:
- compute_vertices:
resize_vertex: false